

Uczenie maszynowe odgrywa coraz większą rolę w prognozowaniu pogody. Numeryczne prognozy pogody mogą powstawać wyłącznie na podstawie uczenia maszynowego lub można wykorzystać metody uczenia maszynowego do poprawy jakości warunków początkowych modeli opartych na równaniach fizycznych. Poniżej przedstawione są wyniki dla drugiego przypadku, gdzie uczenie maszynowe wykorzystane zostało do poprawy warunków początkowych używanych przez numeryczne modele prognoz pogody. Jednym z celów konsorcjum ECMWF jest połączenie numerycznych modeli prognoz pogody opartych na równaniach fizycznych z modelami wykorzystującymi uczenie maszynowe. Pozwoli to na przekroczenie obecnych granic dokładności prognoz pogody przy zachowaniu realizmu i łatwości interpretacji wyników. Zmiany te zostaną wdrożone do operacyjnego systemu prognoz ECMWF z początkiem roku 2025.
Równolegle, konsorcjum ECMWF podejmuje działania w kierunku poprawy metod prognozowania pogody korzystając wyłącznie z uczenia maszynowego, uwzględniając również prognozy wiązkowe. Osobnym zagadnieniem badawczym opracowywanym w konsorcjum ECMWF jest wytwarzanie prognoz pogody za pomocą metod uczenia maszynowego wykorzystując jedynie obserwacje meteorologiczne.
Redukcja błędu modelu przy tworzeniu warunków początkowych
Jednym z głównych elementów numerycznej prognozy pogody jest asymilacja danych obserwacyjnych w celu ustalenia warunków początkowych prognoz. W ECMWF dla modelu IFS wykorzystywana jest asymilacja metodą 4D-VAR. Polega ona na korekcji prognozy krótkoterminowej w taki sposób, aby lepiej pasowała do obserwacji meteorologicznych dokonanych w ostatnim okresie, zwanym oknem asymilacji.
Ta krótkoterminowa prognoza nazywana jest „pierwszą próbą” (“first guess”) albo „tłem”, a zaktualizowana do obserwacji prognoza to „analiza”.
Zazwyczaj używana jest metoda 4D-Var z tzw. „silnymi warunkami”, w której uznaje się model za idealny i nie wprowadza żadnych błędów do analizy. W 4D-Var ze „słabymi warunkami” tak nie jest, więc wprowadzane są pewne korekty.
– W pewnym momencie zdajesz sobie sprawę, że istnieją systematyczne różnice między modelem a pewnymi obserwacjami. Musisz wtedy wziąć pod uwagę fakt, że model może konsekwentnie popełniać błędy przy konkretnych sytuacjach meteorologicznych – stwierdza naukowiec Massimo Bonavita z ECMWF.
Zazwyczaj, korekty błędu mają określone, stałe wartości zależne od kroku czasowego, jak pokazuje poniższy schemat:
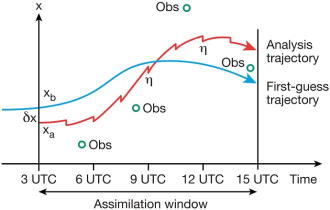
W asymilacji danych poprzednia prognoza, tu zwana „first-guess trajectory”, jest podmieniana na skorygowaną prognozę, tutaj „analysis trajectory”. Tradycyjne 4D-Var ze słabymi warunkami stosuje poprawę o stałej wartości η do korygowanego przebiegu prognozy, by usunąć błąd systematyczny (bias) na tyle, na ile jest to możliwe.
Uczenie maszynowe może być użyte do zmieniania wartości korekt w celu uwzględnienia błędów modelowych. Dotychczas poprawa stanu atmosfery w modelu dokonywana była tylko w stratosferze, teraz jest to możliwe również w troposferze.
– Jest to większy problem, bo błędy modelu są mniejsze, ale nadal znaczące, zwłaszcza w warstwie granicznej atmosfery i blisko styku atmosfery z powierzchniami lądów i oceanów – tłumaczy Massimo.
Warstwa graniczna to część atmosfery, na którą bezpośredni wpływ ma powierzchnia Ziemi.
– Tu ważnym jest, by wartość poprawek zmieniała się w rytmie dobowym.
Poniższa animacja pokazuje godzinną zmienność poprawek tendencji temperatury powierzchniowej, porównaną z poprawkami o stałej wartości. Korekty o zmiennej wartości będą uwzględnione w nowym systemie asymilacji danych.
Przebieg poprawek stałych i zmiennych w czasie dla tendencji temperatury przy powierzchni, między 00 UTC 20 lipca 2022, a 10 UTC 24 lipca 2022. Stała poprawka tendencji zmienia się nieznacznie dla każdego 12-godzinnego okna asymilacyjnego. (Autor: Patrick Laloyaux, ECMWF)
Zgodnie z planem konsorcjum, powyższe zmiany mają być wdrożone do modelu IFS w 2025 roku w wersji 50r1.
Redukcja błędu modelu w prognozach
Nadal trwają prace nad korektą błędów modelu podczas liczenia prognoz.
– Naszym planem jest rozszerzenie metody 4D-Var o słabych warunkach przez użycie sieci neuronowej do zredukowania błędów systematycznych modelu w trakcie obliczeń prognozy – mówi Massimo.
Sieć neuronowa nie tylko dostarcza oszacowanie błędów modelu, ale tworzy model tych błędów, zależny od bieżącego stanu pogody. Oznacza to, że metoda ta może być stosowana do dowolnej konfiguracji modelu.
Przy takim użyciu uczenia maszynowego, numeryczna prognoza nadal oparta będzie na rozwiązywaniu równań fizycznych.
– W rezultacie wprowadzamy małą korektę, która minimalizuje błędy systematyczne modelu – mówi Massimo. – A otrzymany wynik pozostaje nadal w pełni spójnym polem fizycznym.
Testy przeprowadzone na prognozach pokazują poprawę wyników dla prawie wszystkich zmiennych i wyprzedzeń.
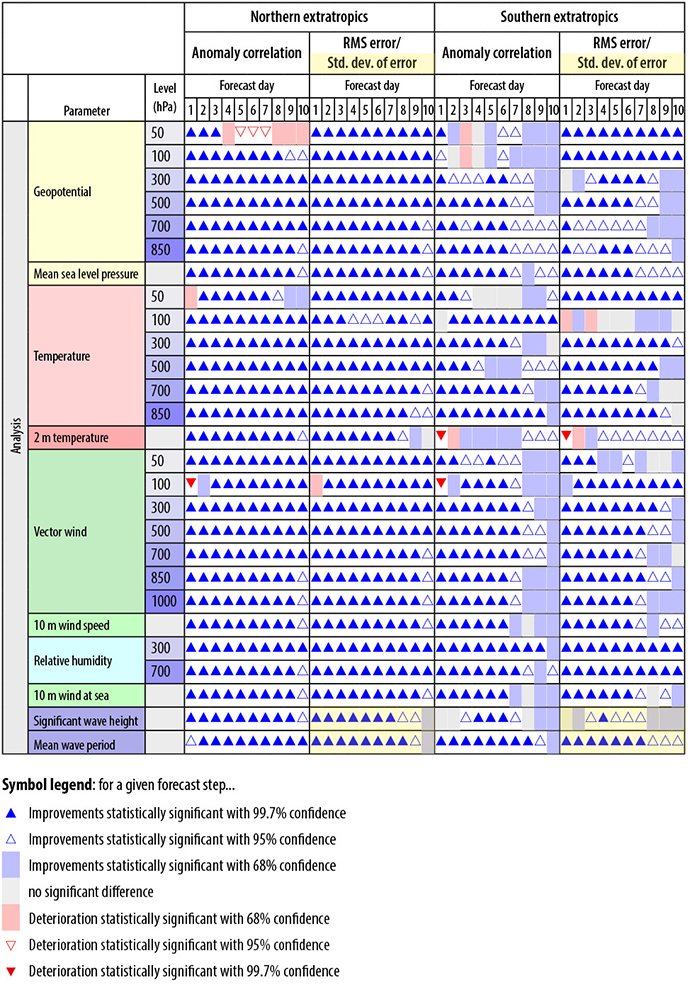
Testy wskazują na poprawę (niebieski kolor) w stosunku do obecnej prognozy dla szerokiej gamy zmiennych i długości prognoz w obszarach pozatropikalnych na północnej i południowej półkuli, weryfikowane za pomocą analiz ECMWF. Wyniki przedstawiono dla korelacji błędów („anomaly correlation”), błędu średniego kwadratowego (RMSE) oraz odchylenia standardowego. Rezultaty w strefie tropikalnej są niejednoznaczne (Autor: Marcin Chrust, ECMWF).
Prace nadal trwają, a ich wdrożenie nastąpi w przyszłym cyklu modelu IFS.
— UDOSTĘPNIJ —